昨天晚上我的朋友圈被两篇文章刷爆了, 第一篇文章 [1] 指责交大团队展出的一个肌肉电传感臂环是抄袭国外的Myo臂环,不仅功能相似,而且连概念图也是直接涂抹而成。第二篇文章 [2] 则反驳第一篇文章,声称第一篇文章哗众取宠,交大的研究其实已经独立进行多年,有很多专利注册在先。可是很遗憾,反驳的“真相”,却难言让人信服。
文[1]的第一个攻击点是该团队的产品在功能和实现上,和国外Myo的臂环类似;对此文 [2] 的回应是,交大团队的研究从2009年开始,已经经历多年,而且有11年的样机视频和12,13两项专利注册。而Myo的机型13年底才发货,所以交大的团队“研究在先,何谈抄袭”?
听上去挺有道理,然而细看会发现,第一个问题是,文中所提到的11年的样机视频和12年的专利申请(公布号CN102846317A,实际上后被驳回,仅是申请而已,文[2]在这一点上混淆视听),和“Myo臂环”并非同一设计乃至用途。如下面两图所示,视频和12年的专利, 所提及的设计是信号收集器固定在绑带上,通过魔术贴绑在手臂上,而处理单元和收集器用电缆连接。其列明的设计用途也是“医疗、生物电反馈和体育运动等领域”,并非一个“体感控制装置”,更不是“臂环”。而信号收集和信号处理分离的肌电采集本身并非什么新概念,中科大在09年也曾经试图申请过相关专利(CN103393420A)。
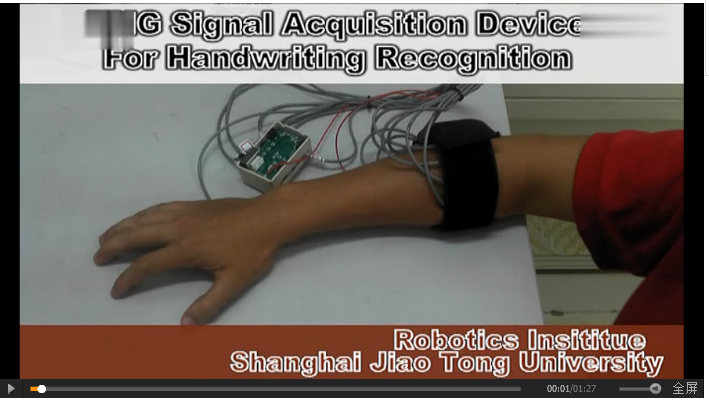
图1 样机视频
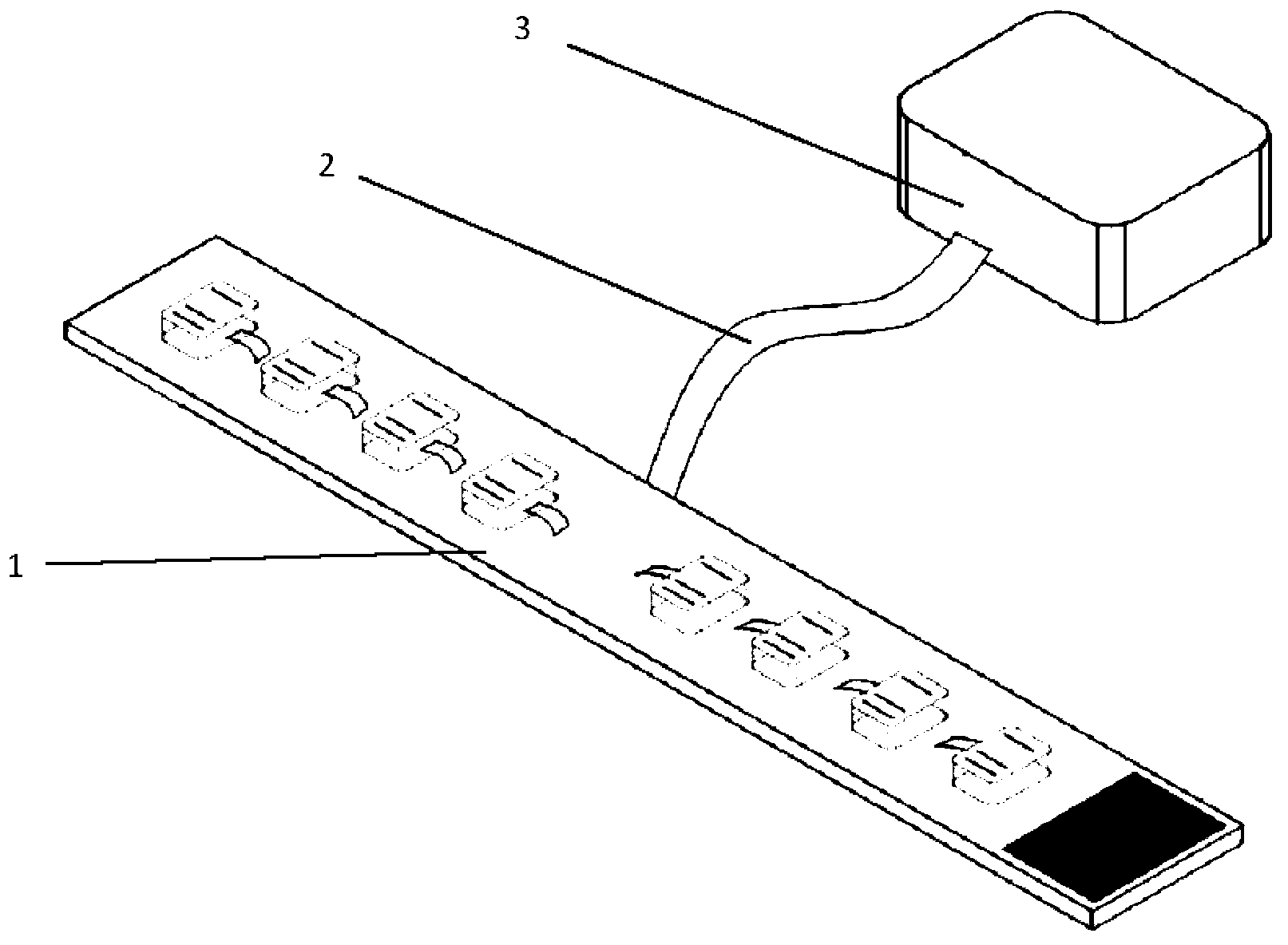
图2 该团队12年申请专利的附图
12年的专利并不是臂环,13年的专利总说的是臂环了吧?这就牵扯到第二个问题,反驳的文章有意将”概念公布”和“实机发售”混为一谈。Myo直到13年底才开始发送开发版,14年才发售销售版,但是该项目早在13年2月就公布了原型概念(图4),并开始众筹。而交大团队的臂环专利(CN103315737B)是2013年6月份才提交,而且设计方案和Myo当时的原型机十分相似(图3)。换句话说,该团队的专利申请时间恰巧在Myo概念公布之后,并不能证实交大团队已经有了臂环的idea。

图3 Myo 2013年2月公布的产品设计图

图4 交大团队2013年6月提交的专利附图
梳理一下的话,时间的先后顺序大概是这样的:
11年交大团队的有线绑带样机->12年该团队绑带+有线设计专利申请->13年2月Myo展出概念机->13年6月该团队提交臂环专利->13年底Myo发出首批产品->14年底该团队在工博会上展出假肢手的视频。
而关于文[1]中关于“该团队概念图系Myo产品图涂抹而成”的指责,文[2]回应说“概念图已获得专利”,只是“由于商业原因不能公布”。关于“该团队臂环在功能上究竟有无超越Myo臂环之处”,也未见文[2]做出解释,略显遗憾。
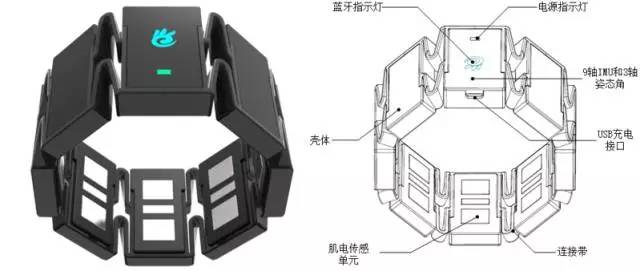
图5 交大官方微信推送的产品概念图

图6 Myo消费版产品图
需要声明的是,我并不以为交大团队是“抄袭”,毕竟科研领域的方向、设计思路撞车,是再常见不过的事情;看似相似的成果,背后的技术实践也可能截然不同。然而既然号称自己是交大人,有意模糊不同内容的专利之间的区别,或是强调“实机发售”的日期而忽略“原型提出”的时间;乃至拿批评者的身份与学校说事,揣测他人的动机,就未免有失交大人实事求是的风范。这样的“辟谣”,恐怕只能起反作用。
其实,作为一个工作在工程领域的人员,更应该有一份工程师的骄傲:复现别人的技术就是复现别人的技术,借鉴他人的概念就是借鉴他人的概念,不要把它说成是自己的。因为我们应该是最清楚理论和实践距离的一群人:看上去很美的产品概念,到实现到底有怎样的距离;看似功能相差无几的产品,内部实现的水平和难度可以有多大的差距;而这差距背后又会是多少个人多少个月的汗水。从某种程度上来说,工程研究的意义,不正在于用数据的积累和经验的累积,用对于点滴细节的反复琢磨和钻研,去告诉世界,“你以为它很简单大家耳熟能详,其实想做好比你想象的要复杂很多”吗。工程研究的价值本来就不是一个简单的概念提出时间先后能评定的,又何必对“模仿”“抄袭”的指责耿耿于怀,乃至要扭曲事实来强行证明自己研究在先呢?
以上。
Also published on Medium.